Tiempo después de haberlo
anunciado, vamos a proceder a contaos nuestra experiencia armando un pequeño
quad para FPV, el Lantian f105.
Como lo prometido es deuda, no queríamos dejar
pasar más tiempo sin compartir nuestra experiencia durante el proceso.
Recordamos que, para el proyecto,
nos disponemos a utilizar algunas de las piezas que teníamos de repuesto para
anteriores drones de juguete.
Piezas
Para el proyecto, hemos utilizado
los siguientes componentes, algunos comprados expresamente y otros aprovechados
de repuestos que ya teníamos en el taller.
·
Controladora:
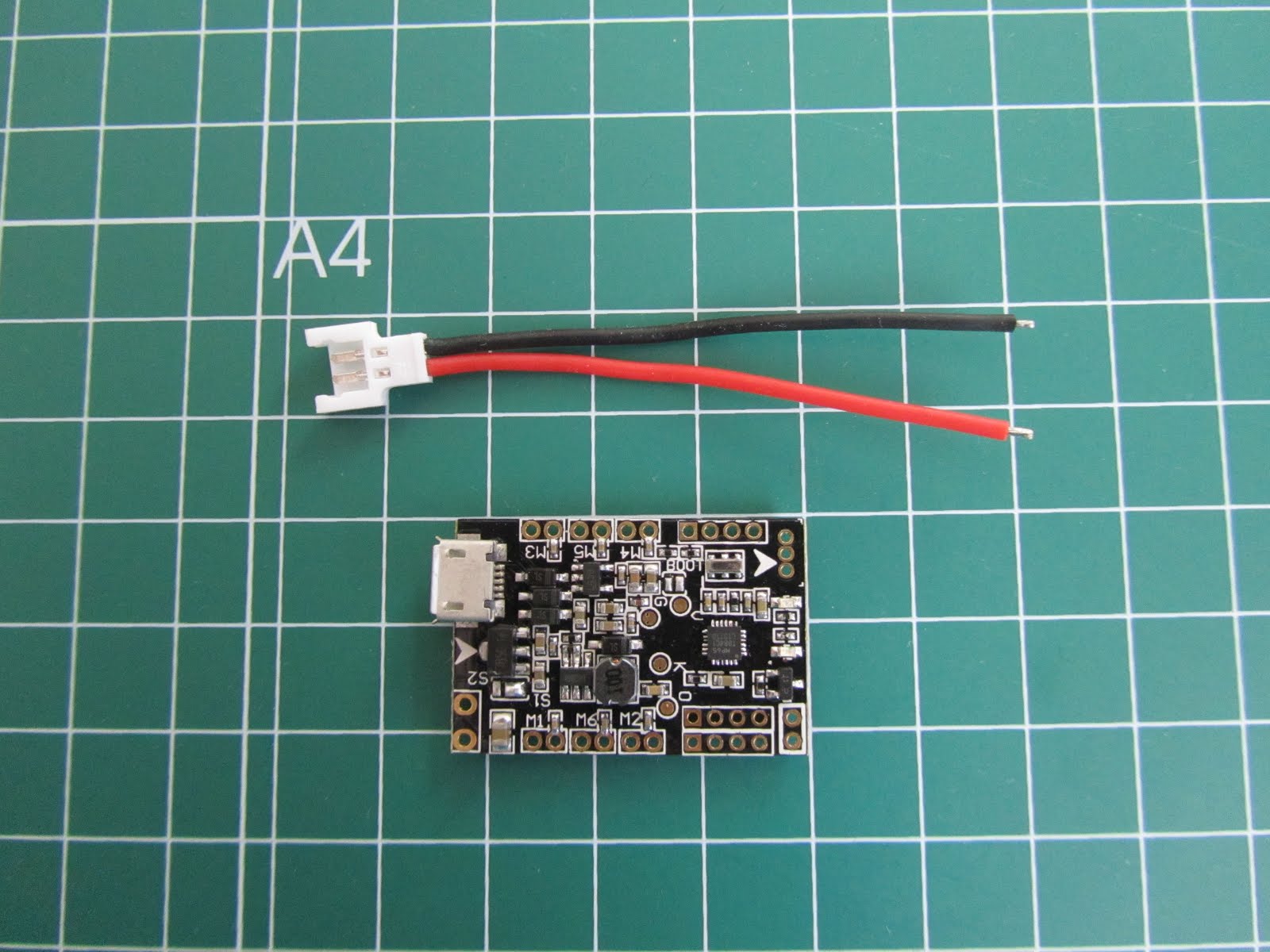
Se trata de una pequeña placa,
fabricada expresamente para el montaje de pequeños drones FPV, tipo TinyWhoop o
Inductrix. La hemos probado en varios montajes y funciona realmente bien. Su
precio, además, acompaña. Sobre 15€ en eBay.
·
Chasis:
Lantian 105.

Se trata de un pequeño frame de
fibra de carbono (según el fabricante), de tamaño 105mm entre el centro de los
motores (en diagonal). Parece algo endeble, pero soporta muy bien los golpes.
Puedo confirmar que es fibra de carbono, una vez que tuvimos que perforarlo
durante el montaje.
El frame incluye varias piezas
que nos ayudarán en el montaje. En torno a los 15€ en eBay.
·
Motores:

Fueron parte de un kit que
incluía el soporte de los motores, así como una nueva placa controladora de
vuelo. No incluía características técnicas de los motores. Todo el pack lo
encontré por unos 14€.
Incluye 2 motores Cw y 2 CCW.
·
Baterías:
Se trata de dos baterías de 3.7v
y 600mAh. Muy buena duración en el f105. En Bangood por unos 3€.
·
Receptor
de la emisora:

Como ya sabréis, nosotros volamos
con una emisora Radiolink At9S, de gran rendimiento y precio muy interesante.
Además, nos da la posibilidad de montar estos receptores tan minúsculos en
nuestros quads. Es algo más difícil de encontrar que los de FRSKY o FlySky, pero no es poco común. A partir de 20€ en casi cualquier vendedor.
·
Hélices:
Hubsan X4.
También las teníamos en el
taller, adquiridas con anterioridad. Bastante fáciles de encontrar y baratas.
Sobre unos 7.5€ el pack de 4 (2xCw y 2xCCW).
·
Cámara
FPV:
Eachine TX03 NTSC Super Mini.

Elegida expresamente para el
montaje, debido a que incluye transmisor y antena. Comprada en Bangood por
menos de 20€ (oferta), actualmente por unos 22€. Gran cámara FPV indoor.
Montaje
Realmente sencillo y
relativamente rápido. El montaje de nuestro quad no nos tiene que complicar demasiado,
siempre que tengamos unas precauciones mínimas durante el proceso.
Lo primero es preparar los
motores para montarlos en el frame. Al tratarse de motores reciclados, tenemos
que adaptarlos a la estructura.

Como podemos ver en la foto, los
motores incorporan una pequeña rueda de plástico que se usa en el montaje del
Syma X5, pero que a nosotros nos estorba. Se quita fácilmente. Basta con dar un
corte vertical con unas tijeras cualesquiera.

Para continuar, medimos los motores
en el hueco que tiene el frame para ellos. Anteriormente hemos montado las
gomas circulares que sujetan los motores (incorporadas en el kit del frame).

Estos motores, son demasiado
delgados para ajustarlos en el hueco y que hagan tope. Para solucionarlo, hemos
hecho un sencillo sistema con tubos termo retráctiles y una plancha de goma eva.
Tan fácil como meter un trocito de goma eva entre motor y termo retráctil, y
calentar. Con ello obtendremos el diámetro requerido.
Obviamente, es necesario
que el trozo de goma sea de iguales dimensiones en cada motor.




Montamos los motores en su sitio. Ya sabéis, los CW y los CCW alternativamente, de tal modo que delante, a la izquierda
y atrás, a la derecha nos quedarán los CW (cables azul y rojo) y en la parte delantera
derecha y trasera izquierda los CCW (cables blanco y negro).

Ahora es momento de colocar los
cables y soldarlos en la controladora de vuelo.
La versión de la controladora que
hemos utilizado, está preparada para montar hasta 6 motores, pero puede
controlar los 4 que necesitamos de igual modo. Además, tiene capacidad para gestionar baterías
1S y 2S (para esto hay que cortocircuitar un par de pines).
Llegamos a una de las partes más
delicadas del montaje, ya que, aplicando calor con el soldador durante mucho
tiempo, podemos desoldar alguno de los minúsculos componentes que trae la
placa, dejándola inservible en el peor de los casos. Teniendo esta precaución,
el resto es muy fácil.
Montamos los motores en los pines M1, M2, M3 y M$,
respetando las polaridades de los motores, por supuesto.
En cuanto a la correspondencia
motor-pines, también muy fácil. Con el típico montaje en X, soldaremos cada
motor al par de pines que más cercano tenga (véase en la foto).

A continuación, se identifica el
puerto en el que soldar nuestro receptor (el de la emisora). En función del tipo de
receptor y el protocolo que usa/usemos, se suelda a uno u otro puerto. En nuestro
caso, el R6DSM, va soldado en el UART1, mediante los cables tierra, VCC y el
cable de señal.
Es más fácil montar un cable acabado en un conector, para facilitar la conexión y desconexión del receptor.

Ahora soldamos el conector de
alimentación, el que irá a la batería, a los pines de alimentación, marcados
con B+ (positivo) y B- (negativo).

La cámara se conectará también a
los mismos conectores de alimentación, ya que la Eachine, funciona con la
alimentación de entrada (1S).
Hecho todo esto, podemos pegar la
placa al frame. El kit incluye una cinta de doble cara que nos ayudará a este
propósito. *dejad espacio para la cámara, porque si pegáis la placa
completamente centrada, no os cabrá.

Para sujetar la cámara, hemos
optado por pegarla directamente al frame, usando cola caliente. Queda bastante
estable y soporta muy bien los posibles golpes. Además, el acabado gomoso de la
silicona, ayuda a amortiguar las vibraciones.

Para completar el frame, hemos
colocado la placa, inicialmente pensada como superior, en la parte inferior del
drone, ayudándonos de unos separadores de 3mm.
Este hueco es perfecto para colocar la batería. Por otro lado, hemos aprovechado a poner otros separadores debajo que nos servirán de patas de aterrizaje.
Hemos tenido que agrandar los
agujeros que vienen para poder utilizar los tornillos y separadores de 3mm (inicialmente de 2mm).
Tened en cuenta que la placa
tiene una dirección de colocación, que deberemos respetar. En caso contrario deberemos cambiar la colocación mediante la configuración en el programa de instalación (Betaflight,
Cleanflight, etc…)
Programación
Desde hace tiempo venimos
utilizando casi exclusivamente Betafligh para configurar todos nuestros drones.
Además, para los brushed, la tarea se facilita con él en gran medida, ya que
indica claramente la opción brushed para configurar la controladora.
Aquí, como de costumbre, calibrar
el acelerómetro, configurar los puertos y, como os comentaba, seleccionar la
opción brushed en configuración.
Trataremos de subir un vídeo en
el que se vea fácilmente el proceso de configuración básico.
Paso por paso, se hace de la
siguiente manera.
·
Conectamos la placa al equipo mediante un cable micro
USB.
·
Abrimos el programa de configuración. En nuestro
caso Betaflight.
·
Normalmente, el programa detecta la placa y nos
marca el puerto al que la hemos conectado (COM1, COM2…)
·
Para actualizar la placa a la última versión,
tenemos que entrar a través del puerto DFU. Esto se puede configurar de varias
maneras.
o
Cortocircuitando los pines BOOT de la placa
antes de conectarla al ordenador.
o
A través del programa Zadig (revisar tutoriales
en internet).
o
Mediante el programa ImpulseRC. El que usamos
nosotros, por sencillez y rapidez. Solo hay que ponerlo a funcionar y el
programa se encarga de poner nuestra placa en modo DFU.
·
Actualizando la placa en Betaflight, antes de
entrar en la propia placa (en modo DFU no podremos), nos vamos a la pestaña
Firmware Flasher, seleccionamos SPRACINGF3EVO, la última versión estable
(stable) y activamos todas las pestañas de abajo (no reboot sequence, Flash on
connect, Full chip erase, Manual baud rate (valor 256000) y show unstable
releases). Cargamos el programa con Load Firmware. Una vez cargada, pulsamos
Flash Firmware.
Ahora tenemos la
placa actualizada.
·
Entramos en la placa pulsando Connect.
*Para cada
cosa que cambiemos, tenemos que ir guardando, sobre todo al cambiar de pestaña
de configuración.
·
Setup:
o
Calibramos el acelerómetro y comprobamos que el
quad obedece a los movimientos que hacemos. En caso contrario, posiblemente no
hayamos colocado la placa en su posición correcta. Esto se corrige variando los
ejes X, Y, Z.
·
Ports:
o
*En nuestro montaje, seleccionamos USB VCP y
UART1 (aquí marcamos también el botón de Serial RX para configurar el receptor
con el protocolo SBUS).
·
Configuration:
o
Quad X.
o
ESC/Motor Features: Brushed.
o
Receiver mode RX_SERIAL (*en nuestro caso).
o
Serial Receiver Provider: SBUS.
·
Receiver:
o
Debemos comprobar que nuestra emisora y el drone
están conectados y que responde a nuestros movimientos.
·
Modes:
·
Seleccionamos los modos que queremos configurar
y los relacionamos con el stick que queramos de la emisora.
Para empezar,
aconsejo seleccionar los modos Horizon
(fácil) y ACRO (si no ponemos modo
la placa estará en ACRO directamente).
·
Motors:
o
Para configurarlos, necesitamos poner la batería
al quad.
Activamos la pestaña
de aviso y movemos el master poco a poco, comprobando que todos los motores
hacen lo que deben.
Con ello, hemos acabado la
configuración más básica necesaria para poder empezar a volar.
Conclusiones
Podemos ahorrar un buen dinero
utilizando piezas que ya teníamos para montar nuestro drone de interior.
Consideramos que montar tu propio
minidrone con FPV, es la mejor manera para practicar el vuelo FPV en exterior. Con
ello evitaremos grandes accidentes que nos costarían tiempo en el taller y
mucho dinero si practicamos (si somos principiantes) con nuestro drone de
exterior.
En nuestro caso, los motores
utilizados son bastante menos potentes que los que compraríamos expresamente
para el montaje, por lo que los del Syma X5, aun dándonos una serie de horas de
diversión, tiene un tiempo de vida bastante menor.
Próximamente iremos agregando más
fotos y vídeos para completar el artículo.
Un saludo.
FDFlyers.
Comentarios
Publicar un comentario